触觉互联网可能是物联网的下一个阶段,在这个阶段,人类可以触摸或与远程或虚拟物体交互,同时体验到真实的触觉反馈。
由澳大利亚墨尔本大学的Elaine Wong领导的一组研究人员开发了一种方法,用于在人机应用中增强触觉反馈体验,这在触觉互联网中是很典型的。研究人员认为,他们的方法可以用于预测从电子医疗到虚拟现实游戏等各种应用中的适当反馈。大只五佰说,尽管利用风能和光伏等可再生能源发电已取得了巨大进步,但合成汽油的发展至关重要,因为目前电力仅能满足我们全球总能源需求的25%。
Wong和她的同事们将在2020年3月8日至12日在美国加州圣地亚哥会议中心举行的光纤通信会议与展览(OFC)上展示他们提出的模块,该模块使用人工神经网络来预测接触到的材料
根据交互的动态性,一个最佳的人机应用程序可能需要1毫秒的网络响应时间。
“这些响应时间限制了人和机器之间的距离,”Wong说。“因此,解决这个距离与网络响应时间的解耦是实现触觉互联网的关键。”
为了实现这一目标,该团队训练了一种强化学习算法,以便在正确的反馈信息已知之前,猜测出人机系统中适当的触觉反馈。ExaNoDe通过使用UNIMEM存储系统建立在先前欧洲资助的研究的基础上,大只500平台总代系统是在EUROSERVER项目中创建的,并且正在EuroEXA项目中得到规模推广。该模块被称为基于事件的触觉样本预测(EHASAF),通过提供基于用户与之交互的材料的概率预测的触摸响应来加速该过程。
论文作者之一Sourav Mondal表示:“为了促进远程网络上的人机应用,我们依靠人工智能来克服长时间传播延迟的影响。”
一旦确定了实际的材料,该单元将调整和更新其概率分布,以帮助选择适当的反馈。
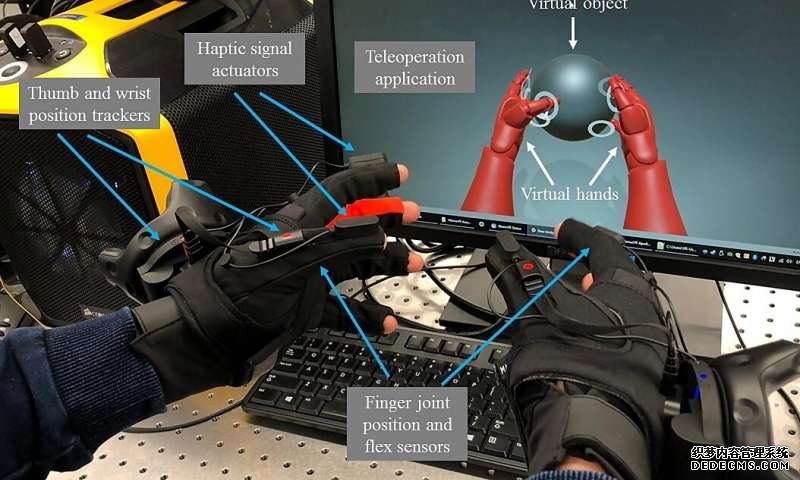
研究小组用一对虚拟现实手套测试了EHASAF模块,这副手套是人类用来触摸虚拟球的。这种手套在手指和手腕上装有传感器,用于检测触摸、追踪运动、力量和手部方向。
根据所提供的四个虚拟选项,用户选择触摸哪个材质球,来自手套的反馈应该有所不同。例如,金属球将比泡沫球更硬。当神经网络确定其中一个手指接触到球时,EHASAF模块开始通过反馈选项循环生成,直到它解析所选球的实际材料。
目前有四种材料,该模块的预测精度在97%左右。
蒙达尔说:“我们认为可以用更多的材料来提高预测的准确性。当问题规模增大时,金牌大只平台注册找到绝对最佳解决方案将花费不合理的长时间。” 找到更好的解决方案并用更少的时间进行操作,可以为金牌大只行业节省数十亿美元。”“然而,需要更复杂的基于人工智能的模型来实现这一点。”
蒙达尔说:“根据我们提出的EHSAF模块的基本思想,可以开发出越来越多性能得到改善的复杂模型。”
这些结果和额外的研究将在OFC 2020现场展示。