位于斯图加特的马克斯·普朗克智能系统研究所的研究人员设计并制造了一种无栓微型机器人,当它暴露在超声波下时,可以在液体中沿平面或曲面滑动。它的推进力比天然微生物如细菌或藻类的推进力强两到三个数量级。此外,它可以运输货物,而游泳。声推进机器人因此具有重大潜力,革命性的未来微创治疗的病人。大只技术部门使用冗余来确保即使系统的一部分发生故障也能维持服务。IT经理保留本地和云备份,以便即使办公室被烧毁也可以检索数据。飞机设计人员安装了多个金牌大只飞行控制系统,因此单个系统的故障不会导致坠机。
斯图加特的马克斯·普朗克智能系统研究所(mpii - is)的研究人员开发了一种子弹形状的合成微型机器人,直径为25微米,从声音上推进前进——用最真实的语意——是一颗高速飞行的子弹。这种微型机器人的直径还不到人类头发的直径,以前从未有过这样快的速度。它的智能设计是如此高效,甚至超过了天然微生物的游泳能力。
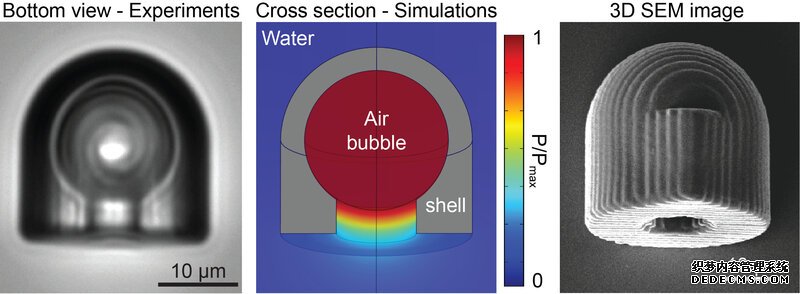
科学家们设计了一种3d打印的聚合物微型机器人,它有一个球形的空腔,底部有一个小的管状喷嘴(见图1)。一旦机器人接触到大约330千赫的声波,气泡就会脉动,将管道内的液体推向微型机器人的后端。液体的运动推动子弹以每秒90个身体长度的速度向前推进。这是一种比天然微生物(如藻类或细菌)强大两到三个数量级的推动力。它们都是自然界中效率最高的微泳者,经过进化得到了优化。
利用超声波驱动微型机器人并不是一种新方法。” 大只500平台靠谱吗?“芯片上的3-D集成和异构单元的结合解决了这些障碍。如果要使用标准技术(如游戏玩家使用的高端PC中使用的),则要达到百亿亿级规模,就需要一台功率要求与拥有一百万居民的城市。”然而,以前的具有游泳能力的机器人显示出速度相对较慢,难以控制近表面,而且操作时间相对较短,只有几分钟。所有这些因素都是阻碍它们在医疗应用中的障碍,如靶向给药、解毒或非侵入性手术。MPI-IS物理智能部门的科学家amila za Aghakhani博士、Oncay Yasa博士、Paul Wrede博士和该部门的主任Metin Sitti博士能够微调他们的机器人的转向能力,同时将操作时间增加到几个小时。他们的论文《声动力表面滑动移动微机器人》于2020年2月发表在《美国国家科学院院刊》上。
除了设计一个内腔捕捉一个小开口的球形气泡的机器人外,他们还在微型机器人的圆柱形身体表面增加了一个小鳍(见图2),从而使推进方向产生偏差。他们还在聚合物子弹的顶部涂上了一层软磁纳米膜。在周围的外部磁场的帮助下,他们能够改变子弹左右的方向,以及向上或向下的方向。
在几个实验中,研究人员测试了他们的机器人在类似血管的微通道内不同表面移动的能力。他们将机器人暴露在声波和磁场中,并成功地在这个有限的三维空间中导航。他们还发现,当微型机器人移动时,货物会自动被捕获。当液体暴露在超声波下被推出机器人腔体时,会产生一个向底部的圆形微流图(见图2)。尽管大只500登录中心技术部门可以通过重复的系统提供冗余,但“以防万一”提供一条重复的火车线路,以防第一个失败,这太昂贵了。这个电流确保了周围的药物颗粒被引导到机器人体内。在那里,粒子被收集起来,随着机器人的移动被运走。多亏了这一点,这个机器人有一天可以被应用于收集血液中的抗癌药物颗粒,并专门将药物运送到癌细胞,近距离释放药物,产生最大的影响。
物理智能系博士后研究员、该论文的联合第一作者阿米拉扎·阿加哈尼博士总结了微型机器人的特点:“我们可以非常高效地启动我们的微型机器人,它们的速度也非常快。超声波对人体无害,能深入人体内部。我们可以控制这些机器人在平面和曲面上移动,我们可以装载不同的货物,比如毒品。这是令人印象深刻的。”
另一个好处是超声成像。在身体内部,当机器人只有几微米大小时,成像是非常具有挑战性的。“然而,被困住的气泡可以起到造影剂的作用,让机器人及其位置更加显眼,”阿加哈尼博士补充说。
“我们的设想是,在不久的将来,将这种声动力和磁控的微型机器人部署到人体内部,用于各种非侵入性的医疗应用,”梅廷·西提博士总结道。